
{kind=link}
")
23 de dezembro de 2022

O sistema de motorização de telescópios a ser descrito foi criado por um americano chamado Mel Bartels. Ao longo dos anos, vários colaboradores ajudaram a aperfeioar o sistema.
Esse sistema foi idealizado com a finalidade de permitir a motorização de um telescópio com um custo muito baixo usando componentes baratos e disponíveis comercialmente. Esse objetivo vai de encontro às necessidades do Astrônomo Amador Brasileiro que não dispõe de equipamentos motorizados no mercado nacional e está totalmente dependente do mercado externo. Além de não poder encontrar tais instrumentos no mercado nacional, ainda está sujeito a abusivas taxas de importação e ao grande custo devido à forte desvalorização que a moeda nacional apresenta em relação ao dólar.
O grupo que desenvolveu esse projeto faz parte do Núcleo de Atividades Espaciais Educativas (NAEE) ligado ao Observatório do CTA de São José dos Campos, SP.
Mais informações a respeito do sistema de motorização pode ser encontrada no site original do autor em http://www.bbastrodesigns.com.
|
A utilização ou montagem incorreta dos circuitos eletrônicos podem danificar o seu PC |
O sistema é baseado em um software denominado SCOPE e roda em um microcomputador PC que não precisa ser, necessariamente, de ultima geração.
Devido à alta taxa de atualização dos computadores de uso pessoal, computadores hoje considerados obsoletos, como os 486, ainda apresentam uma grande aplicabilidade e podem ser adquiridos a custos bem baixos no mercado de usados de informática.
Devido às características de portabilidade e facilidade de uso, recomenda-se o uso de computadores na configuração Laptop ao invés dos chamados Desktop ou micros de mesa. Laptops usados baseados em 486 podem ser adquiridos com custos bem acessíveis.
Existe uma grande variedade de tipos diferentes de telescópios e todos eles podem ter o seu funcionamento motorizado através do computador. Recomenda-se, dentre eles, o tipo Newtoniano com a clássica montagem Dobsoniana pela facilidade de construção e ótimo custo-benefício. Além da montagem Dobsoniana Altazimutal, também podem ser utilizadas montagens do tipo Equatorial com o sistema de motorização Mel Bartels.
A montagem utilizada nesse projeto é do tipo Dobsoniana. Essa montagem se enquadra na classe altazimutal. Na montagem altazimutal, dois eixos são trabalhados para conseguir o apontamento desejado do aparelho. O eixo da Altitude e o eixo do Azimute. Esses serão os eixos onde será feita a motorização.
O movimento do telescópio é acionado por um conjunto de motores de passo ou step motors. Nesses motores, a rotação depende da mudança de campo magnético gerado por bobinas internas. Existem 4 bobinas internas e um conjunto de pulsos são gerados em uma determinada seqüência fazendo o campo magnético ‘girar’. Esse movimento magnético é seguido pelo movimento mecânico transmitido a um conjunto de redução. Esse conjunto de redução, por sua vez, transfere o movimento aos eixos do telescópio fazendo o mesmo apontar para uma determinada direção desejada.
Para gerar essa seqüência de pulsos é necessária a implementação de uma placa de controle que, basicamente, utiliza o sinal proveniente da saída paralela do PC (5V e baixa corrente) e aplica, em outro nível de tensão e corrente nas bobinas dos motores de passos do sistema.
Além do controle automático, através do PC, é possível o controle manual do movimento através de um controle de mão. O chaveamento dos pulsos gerados pelo PC através do controle de mão, alimentará o motor de passo utilizando a saída paralela do microcomputador interfaceado através de uma placa de potência os quais atenderão os comandos do programa de controle SCOPE. Esse programa converte o comando de movimentação do usuário em uma seqüência de pulsos de volta à placa de controle que são transmitidos aos motores de passo.
Esse projeto apresenta um custo relativamento baixo de implementação. Todos os componentes eletrônicos são facilmente encontrados em casas de componentes eletrônicos. O componente mecânico mais crítico é o conjunto de reduções para cada eixo (altitude e azimute), que podem ser facilmente encontrados em casas de sucatas ou desmanches automotivos. Talvez o componente que apresente maior dificuldade de aquisição seja um notebook usado, que não precisa ser de última geração. O mínimo recomendado é um notebook tipo 486.
É possível utilizar computadores convencionais ou Desktop. Porém, a portabilidade nessa configuração fica bem mais comprometida.
A seguir, uma tabela sumarizando os principais custos envolvidos nesse projeto:
| Redutores (limpadores de pára-brisas) |
R$ 60,00
|
| Componentes eletrônicos (com caixa e cabos s/ fonte) |
R$ 130,00
|
| Motores de passo unipolar (200 passos por revolução ou 1.8 graus/passo) |
R$ 10,00 (cada)
|
| Notebook usado tipo 486 (opcional) |
R$ 100,00
|
Placa Principal
8 Resistores 470
2 Hex Inverters 74LS04
4 Resistores 220
1 Resistor 1K
8 Par Darlington TIP120
1 Regulador 7805
3 Capacitores 1uF
4 Diodos 30V/5W
8 Diodos 1N5401
1 Chaves 2 posicao (chave on-off)
1 Led (indicação on-off)
1 Porta Fusivel
2 Soquetes DIP 14 para os 74LS04
1 Extensão cabo paralelo
1 Caixa
1 Diodo 1N4001
2 Conectores DB9 fêmea
2 Conectores RJ45
1 Conector DB25 fêmea
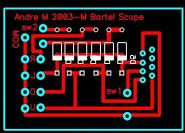
Pad ou Controle de Mão
4 Chaves Push Button NA
1 Chaves 2 posições
1 Chaves 3 posição*
6 Diodos 1N4001 ou 1N914
2 Metros cabo
1 Conector RJ45
1 Caixa
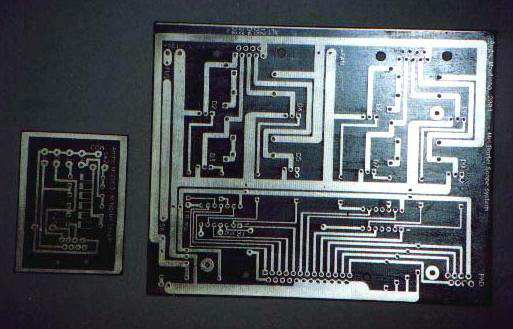
Placa Principal
Uma parte substancial do trabalho de motorização concentrou-se na elaboração das placas de circuito impresso do “driver” de controle e do controlador de mão, apresentado nas seguintes figuras:
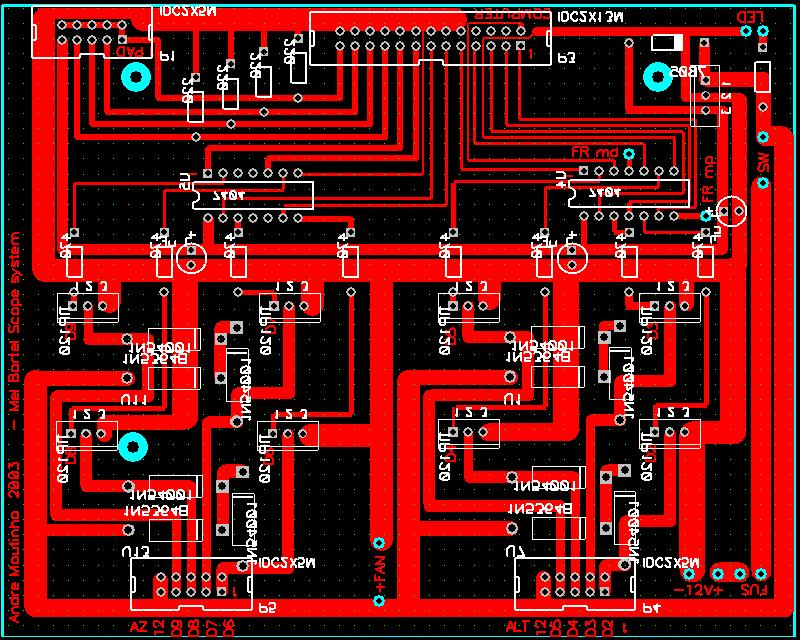
Placa de Mão ou Pad
1 montagem altazimutal Dobsoniana com movimentos bem livres
2 Redutores de motor de para-brisa de Chevette
2 Buchas para conexão dos motores de passo ao redutor
2 pecas para transmissão do movimento ao telescópio
1 dobradiça
1 cantoneira de alumínio
borracha para o eixo da altitude
4 aneis de borracha
2 cantoneiras
Cálculo das Reduções
O objetivo é a obtenção de um valor de redução entre 1000 a 2000. Para tanto, duas reduções são utilizadas.
Reduções através do limpador de pára-brisas
O valor de redução desse componente é fixo. No caso do redutor de limpador de pára-brisas, esse valor é de 1:56. Ou R1=56.
Redução através do eixo de saída e a base do telescópio
Nesse caso, a redução conseguida por esse conjunto vai depender das dimensões da base do telescópio e do eixo cilíndrico de saída que está ligado à redução do limpador de pára-brisas e faz a movimentação da base.
Como exemplo, pode-se citar o telescópio que está ilustrando esse artigo. Este tem uma base com diâmetro de 445mm e eixo de saída com 18mm de diâmetro. Desta maneira, R2 pode ser obtida dividindo-se o valor da base pelo eixo de saída ou R1.R2.
Redução total
A redução total é obtida multiplicando-se a redução R1 pela redução R2.
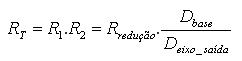
No caso do telescópio ilustrado no artigo,
Ou seja, seriam necessárias cerca de 1384 voltas completas do motor de passo para que o telescópio efetuasse uma rotação de 360 graus no eixo de azimute.
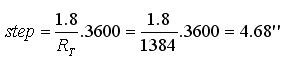
Deslocamento angular por step
Dividindo o valor do step ( 1.8 graus, se o motor tiver 200 steps) pela redução total ou 1384, obtem-se o valor de 4.68 segundos de arco por step do motor de passo:
Deslocamento angular por step
Dividindo o step por 20 microsteps, teremos cada microstep valendo: 0.23 segundos de arco.

Os valores de step e numero_steps são configurados no arquivo CONFIG.DAT do programa SCOPE.EXE.
A construção do conjunto motor-redutor de Altitude é muito semelhante à construção do conjunto motor-redutor de Azimute. A única diferença se encontra na fixação desse conjunto à montagem Dobsoniana.
Para aumentar o torque dos motores de passo e também a fim de se obter um reduzido ângulo de rotação por “step”, utilizou-se um redutor de limpador de pára-brisas de Chevette, que pode ser facilmente adquirido em comércio de sucatas ou desmanche automotivo.
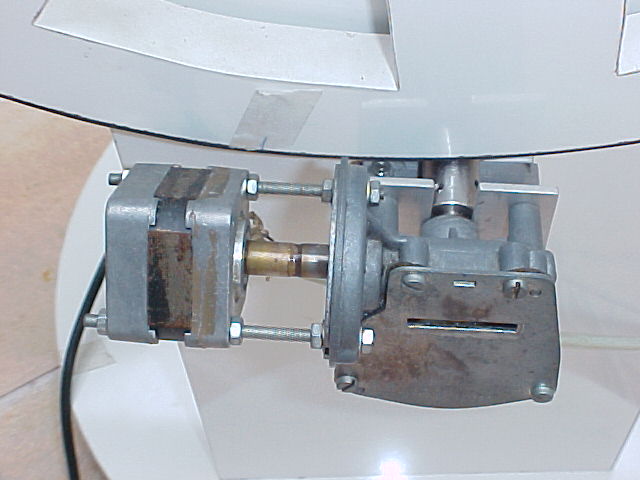
A chave da montagem do conjunto se encontra no acoplamento do eixo do motor de passos ao eixo sem-fim do redutor de pára-brisas. A melhor alternativa encontrada foi executar esse acoplamento através de um tubo plástico de diâmetro levemente inferior ao diâmetro do eixo do sem-fim, de forma a obtermos uma fixação adequada e, ao mesmo tempo, uma maior flexibilidade para acomodar eventuais desalinhamentos entre os eixos. A dica para se afixar os eixos com o tubo plástico é utilizar-se de banho-maria.
Antes de se chegar a essa abordagem, foi tentada a fixação rígida, através de acoplamento metálico, que não teve êxito devido à grande dificuldade de se obter perfeito alinhamento entre os eixos. Desalinhamentos geravam forte vibração no conjunto motor-redutor dificultando o livre movimento do motor e redução. Para fixar o motor de passo ao redutor do pára-brisas em alinhamento, utilizou-se de espaçadores, parafusos e porcas.
Detalhe da junção motor - redutor


Motor de altitude
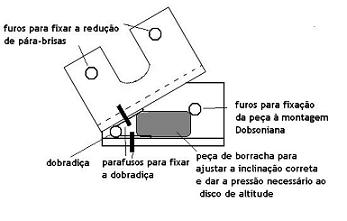
Para fixar o conjunto motor redutor de altitude à montagem Dobsoniana utiliza-se um suporte feito com uma cantoneira de aluminio de 3 mm de espessura.

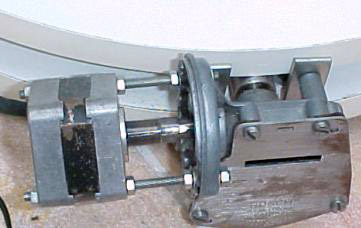
Motor de azimute
Para fixar o conjunto moto-redutor de azimute à montagem Dobsoniana utiliza-se um par de cantoneiras de ferro e 4 espaçadores de borracha permitindo ajuste à ficção. Através do aperto dos parafusos é possível ajustar a altura do conjunto motor redutor em relação á base superior da montagem Dobsoniana.

O software SCOPE foi desenvolvido por Mel Bartels e representa o controle principal do sistema de motorização. A seguir, a tela principal do programa:
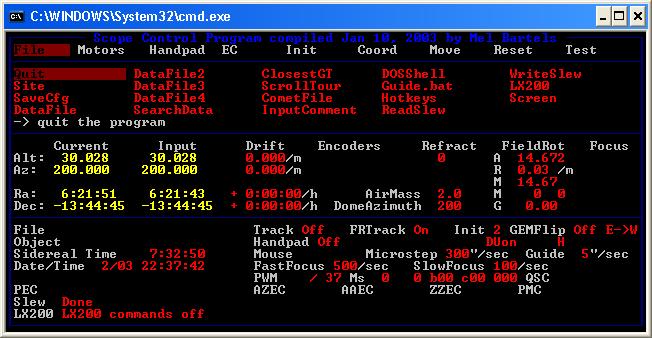
Apesar desse projeto utilizar uma montagem altazimutal tipo Dobsoniana o software ainda é capaz de trabalhar com montagem equatorial.
O SCOPE apresenta as seguintes funcionalidades principais:
O SCOPE foi desenvolvido em ambiente DOS, com perspetivas para Linux. Pode ser baixado diretamento de http://www.bbastrodesigns.com.
Para instalá-lo, basta simplesmente descompactar o arquivo ZIP para um diretório do seu hard disk ou disquete. Convém lembrar também que não necessidade de um Hard Disk na máquina que será utilizada o SCOPE. Basta utilizar simplesmente um disquete de boot DOS contendo os arquivos do SCOPE.
O SCOPE não roda em Ambiente Windows NT, 2000, XP ou Vista. É possível fazer ele rodar em Windows 95, 98 e ME. Porém é recomendável rodá-lo diretamente em DOS. Caso o seu sistema operacional não permita inicializar com em modo DOS (e.g. Windows XP), pode-se fazer a inicialização através de um disco de boot Windows 95 ou 98.
Para baixar uma software para criação de discos de boot para Windows 95 clique aqui
Após instalar o software SCOPE, este apresenta as configurações originais e precisam ser alteradas.
Basicamente, é necessário fazer as seguintes customizações para poder operar o scope com a montagem construída sem se preocupar com a motorização no Field Rotation e Focalizador:
Temporização dos Pulsos dos Motores de Passo
Adequação do Software à Montagem Mecânica
Configuração da Latitude e Longitude
Todas as configurações do SCOPE ficam armazenadas no arquivo CONFIG.DAT. Somente esse arquivo deve ser "salvo" para que suas configurações do SCOPE se tornem efetivas e relativas ao seu telescópio. Para utilizar outro computador, basta instalar o arquivo de instalação original e copiar o arquivo CONFIG.DAT "salvo".
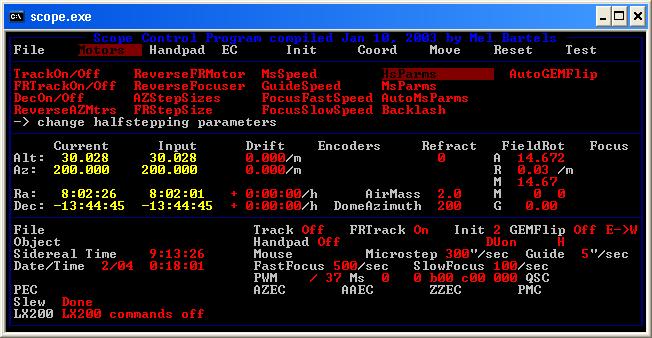
Temporização dos pulsos dos motores de passos
Tem como objetivo encontrar a máxima velocidade de SLEW dos motores atráves do ajuste temporização dos pulsos gerados. Esse ajuste é feito experimentalmente após tudo estar finalizado.
Esse ajuste é feito através da opção FILE->Motors->HsParams:
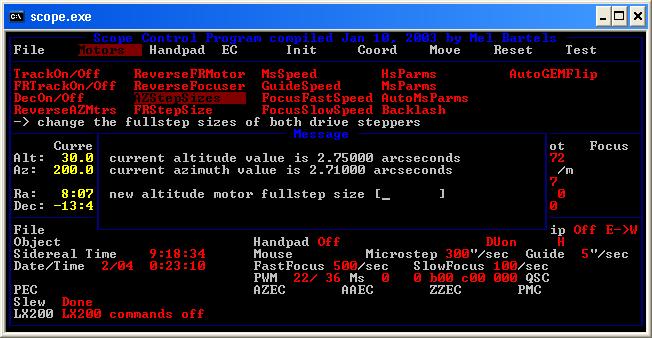
Adequação do Software à Montagem Mecânica
Informar qual a relação entre a rotação REAL do telescópio e a quantidade de pulsos fornecidos aos motores. Esse ajuste é efetuado na opção Motors->AZStepSizes
Configuração da Latitude e Longitude
A configuração da latitude e longitude é feita diretamente no arquivo CONFIG.DAT. Abaixo, está descrita a localização dos parâmetros que deve ser alterados:
| [*** astronomical times section ***] LatitudeDeg 23.000000 <-Altere a Latitude aqui CMOS_RTC_Access 0 LongitudeDeg 45.000000 <- Altere a Longitude aqui Tz 3 <- time zone DST 0 <- coloque 1 caso horário de verão |
ø180 mm f/7 - André Moutinho

ø160 mm f/7,25 - Mauro Corrêa

C3PO - Elias Lobo

23 de dezembro de 2022

23 de dezembro de 2022
 Para Astrofotografia")
23 de dezembro de 2022

23 de dezembro de 2022

23 de dezembro de 2022
